Please refer to the full list for all publications
|
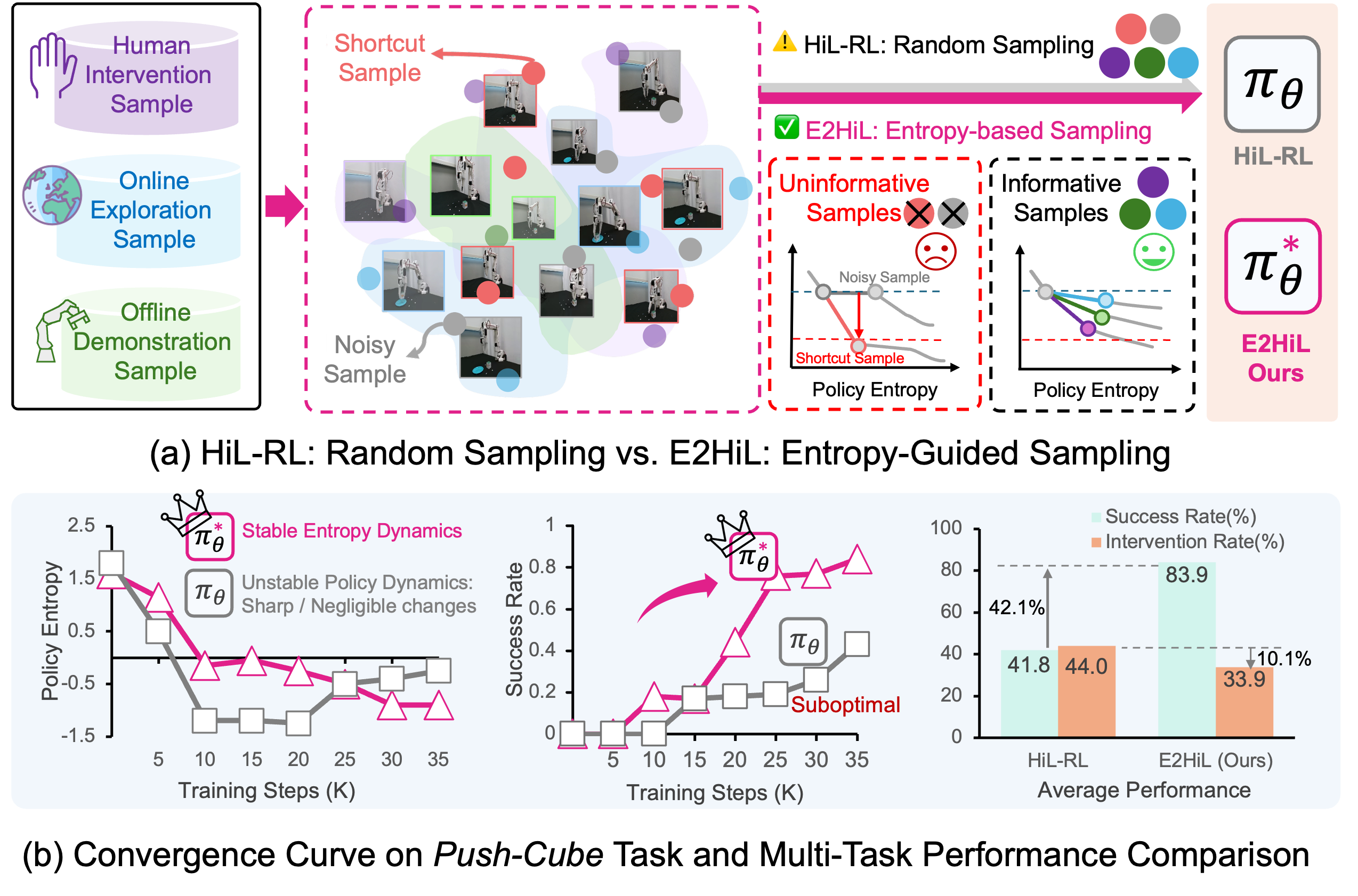
E2HiL: Entropy-Guided Sample Selection for Efficient Real-World Human-in-the-Loop Reinforcement Learning |
|
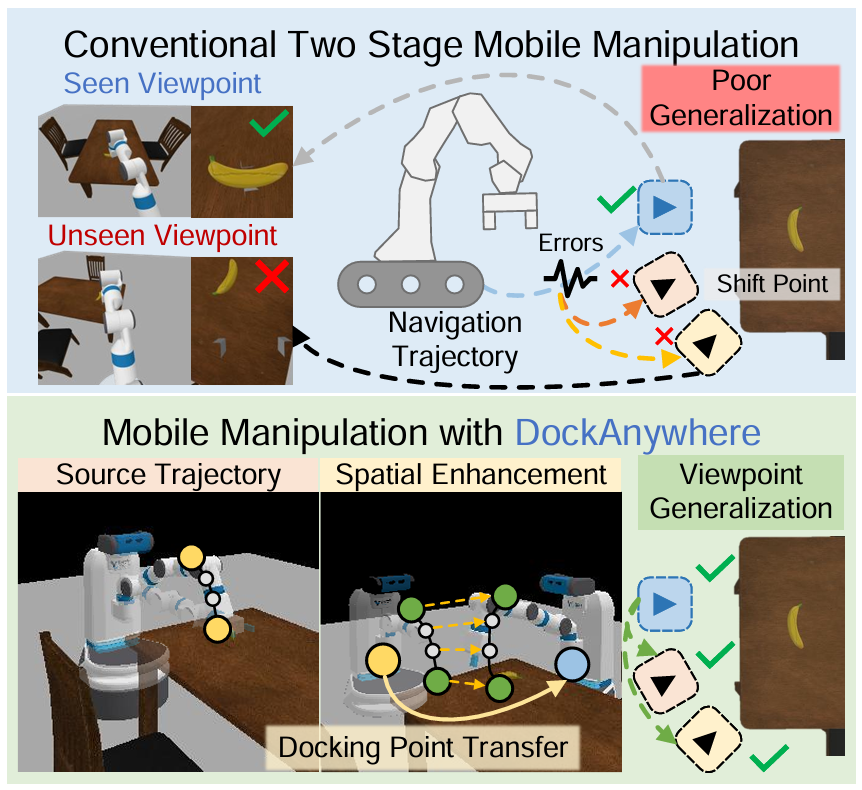
DockAnywhere: Data-Efficient Visuomotor Policy Learning for Mobile Manipulation via Novel Demonstration Generation |
|
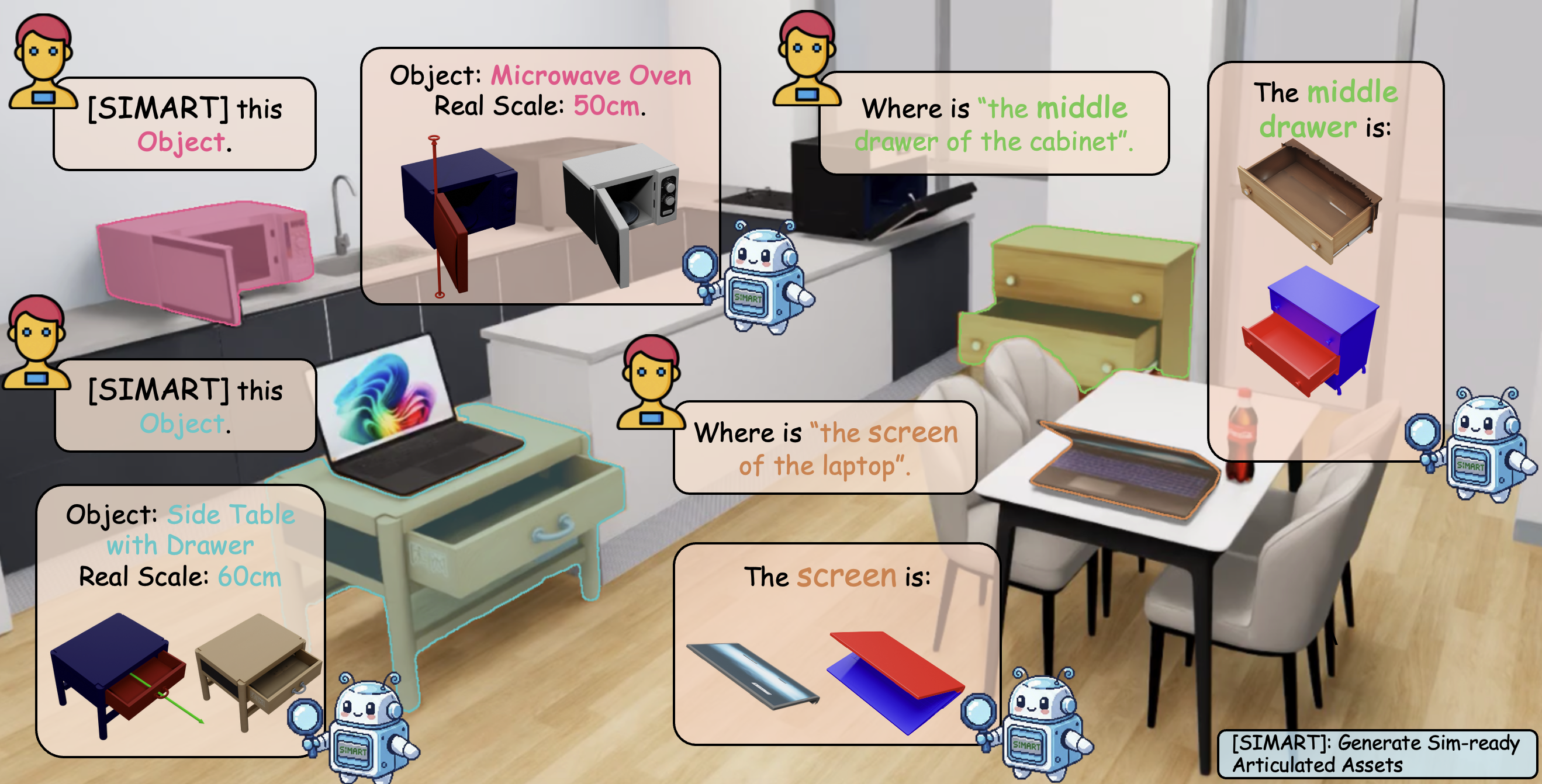
SIMART: Decomposing Monolithic Meshes into Sim-ready Articulated Assets via MLLM |
|
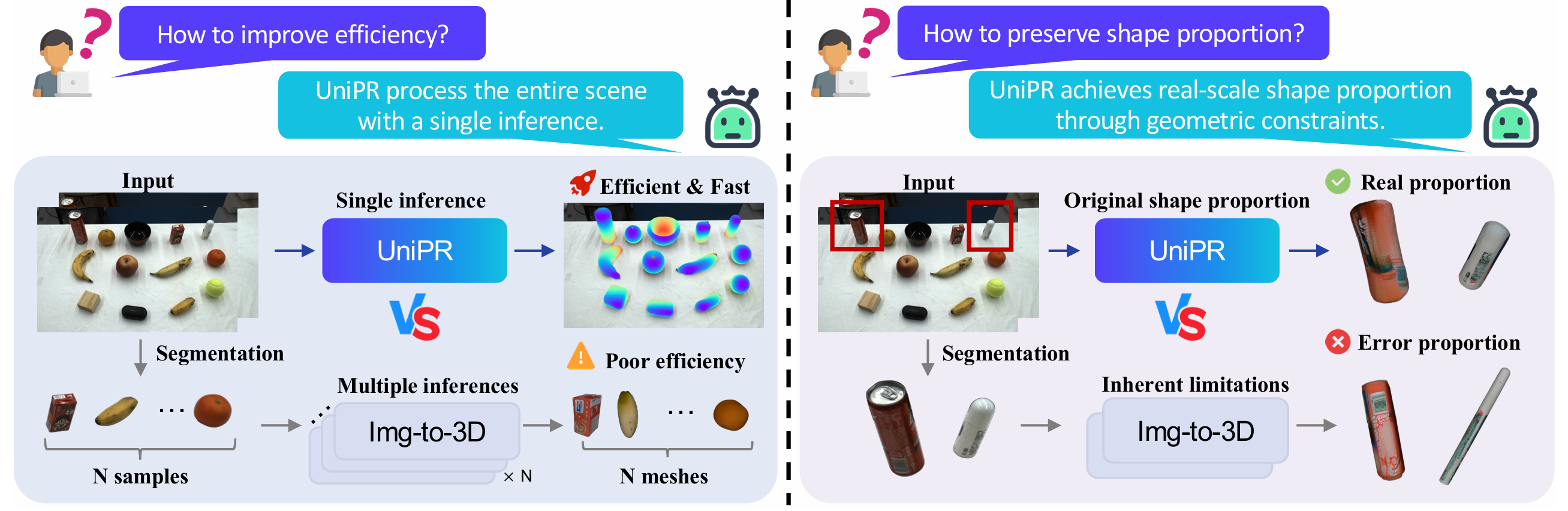
UniPR: Unified Object-level Real-to-Sim Perception and Reconstruction from a Single Stereo Pair |
|
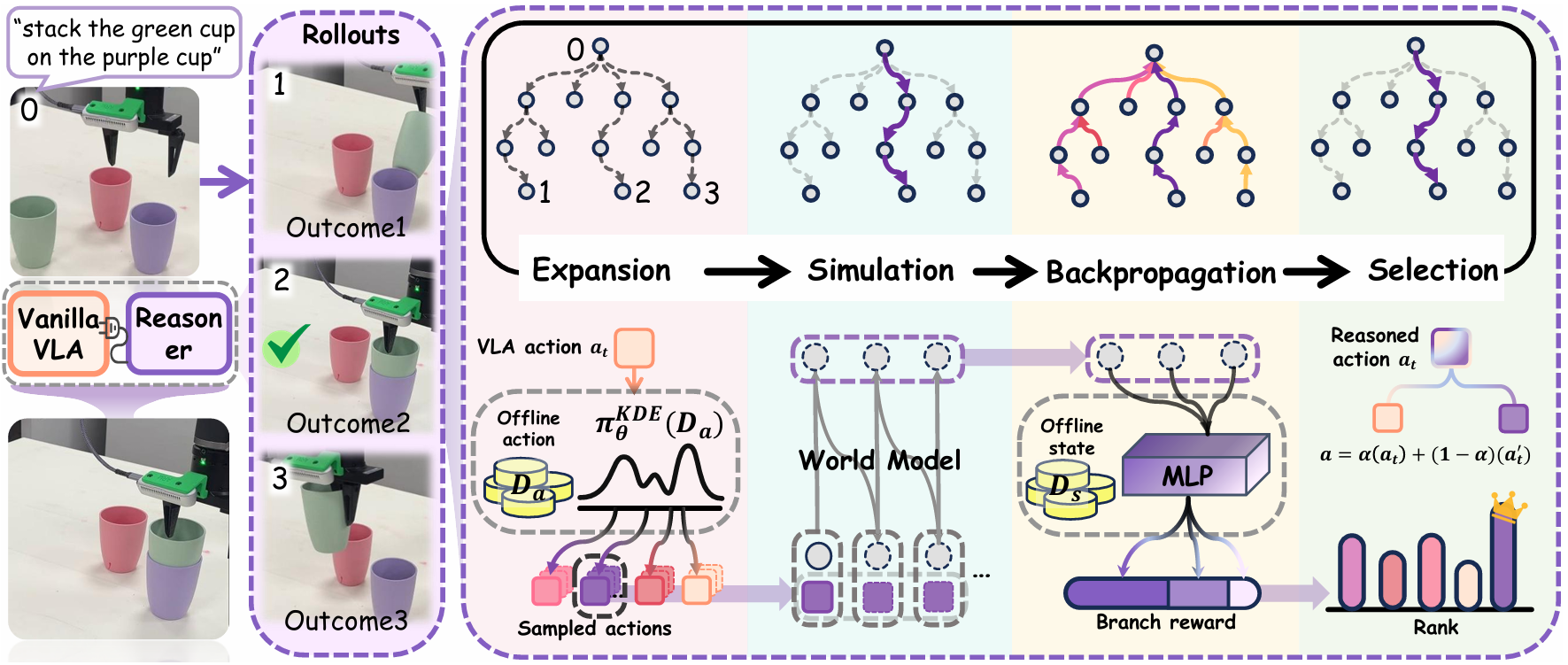
VLA-Reasoner: Empowering Vision-Language-Action Models with Reasoning via Online Monte Carlo Tree Search |
|
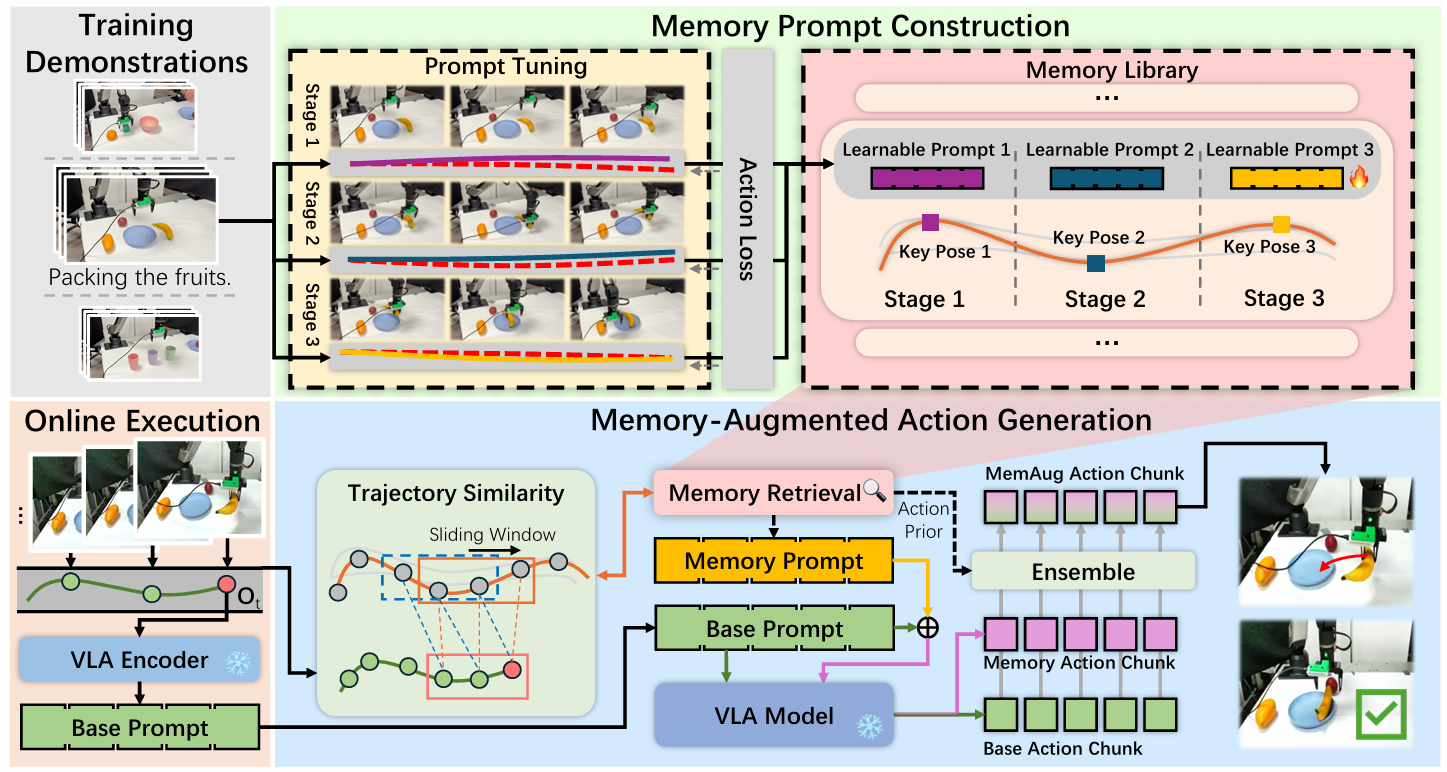
MAP-VLA: Memory-Augmented Prompting for Vision-Language-Action Model in Robotic Manipulation |
|
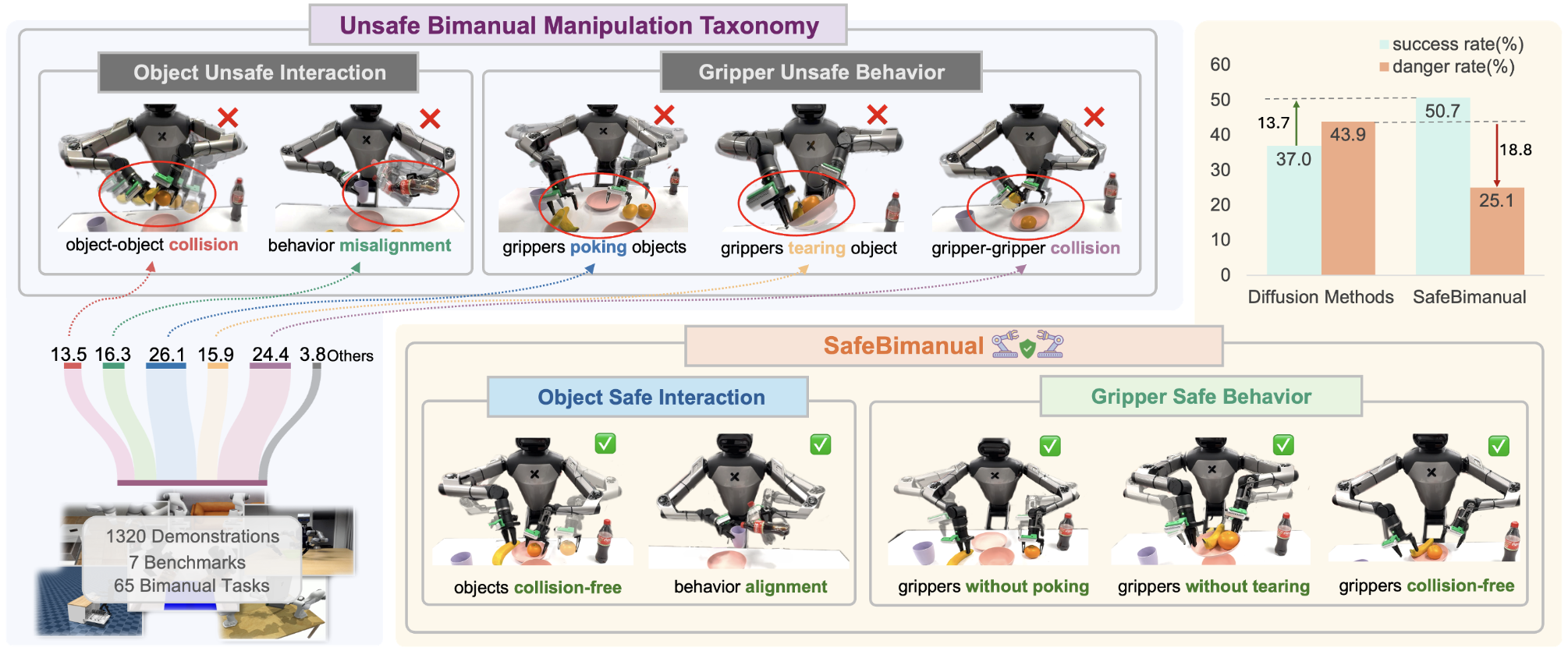
Safebimanual: Diffusion-based Trajectory Optimization for Safe Bimanual Manipulation |
|
MoTo: A Zero-shot Plug-in Interaction-aware Navigation for General Mobile Manipulation |
|
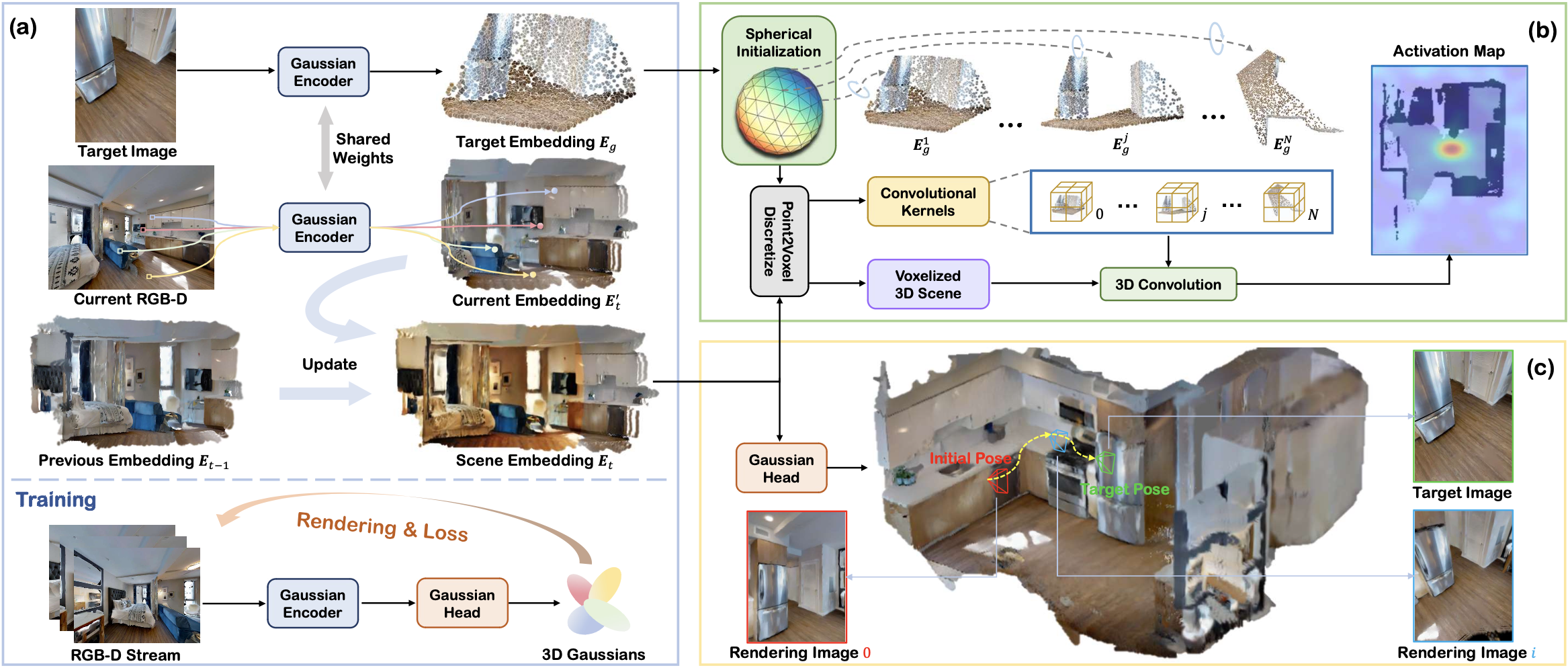
Incremental 3D Gaussian Localization for Image-goal Navigation |
|
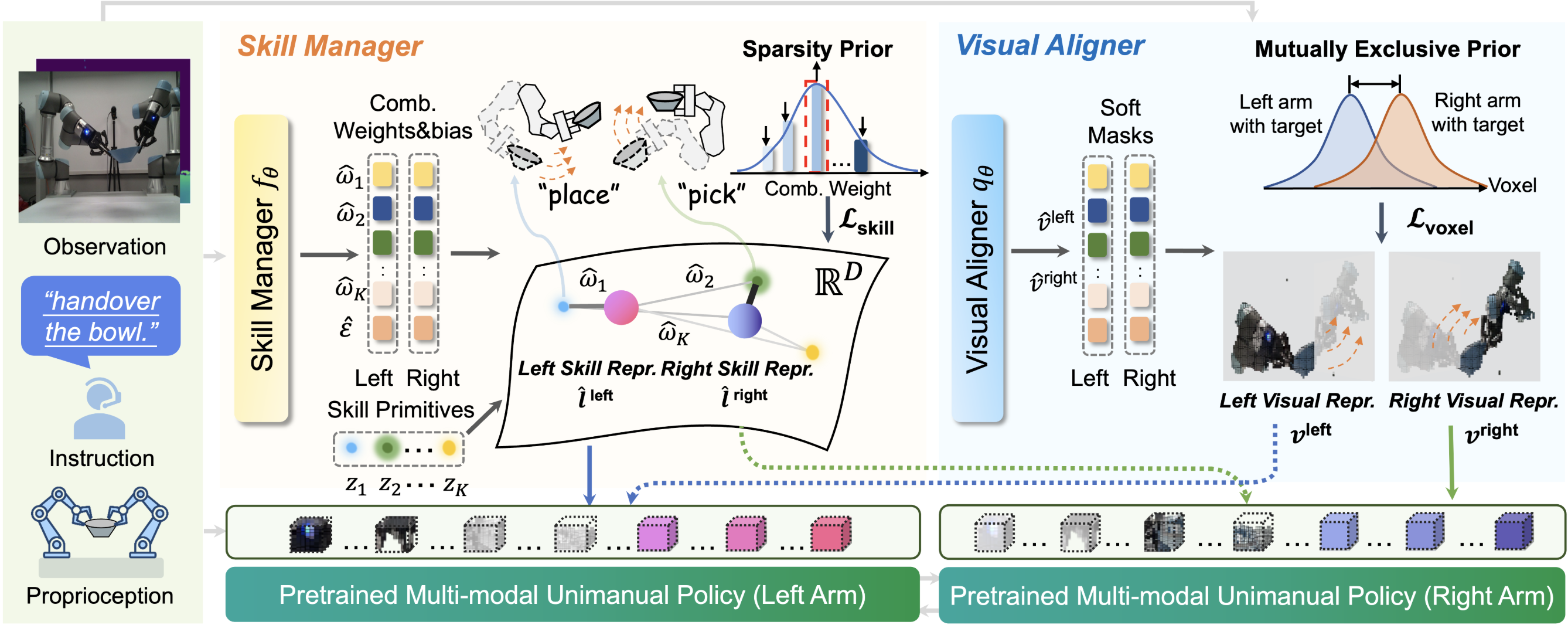
AnyBimanual: Transferring Unimanual Policy for General Bimanual Manipulation |
|
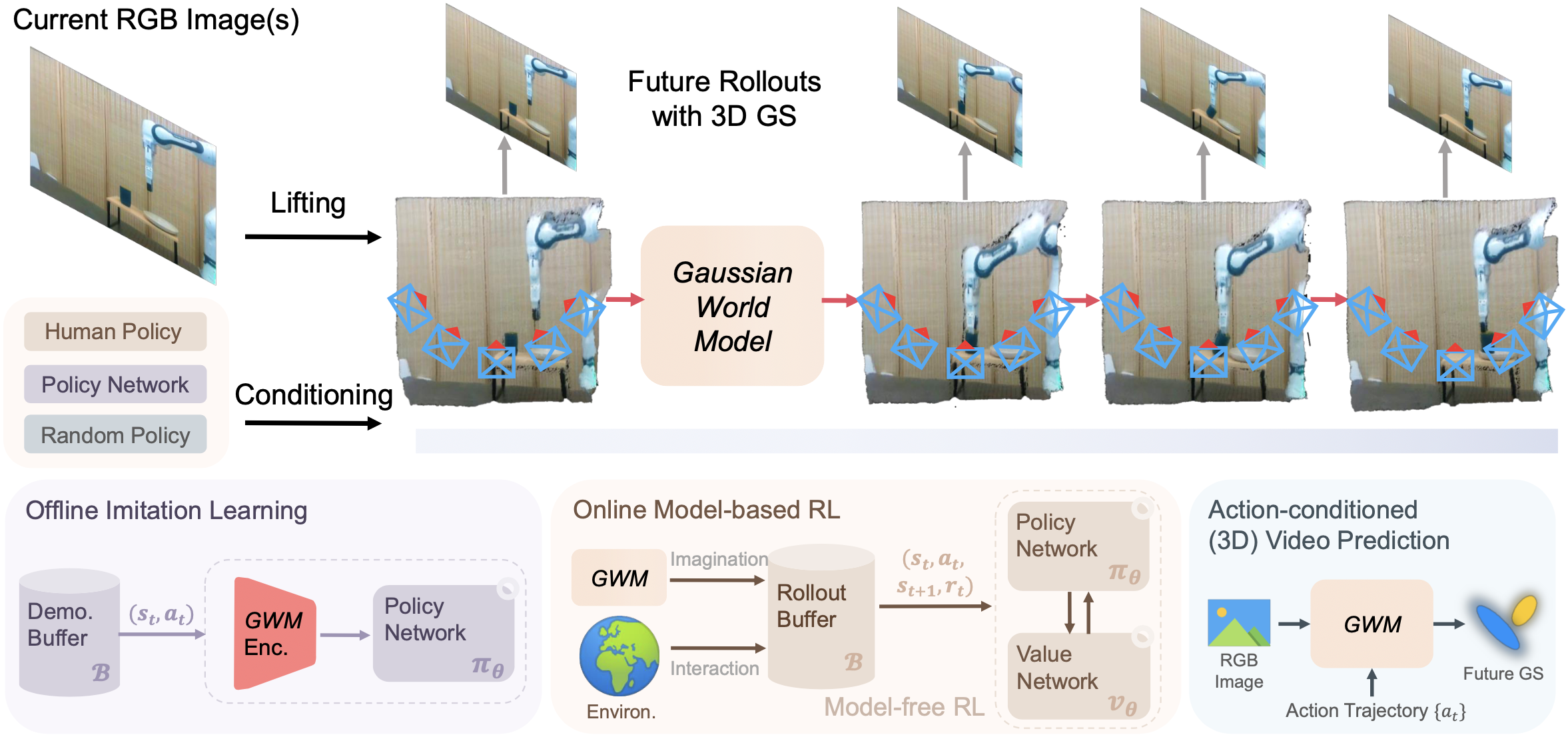
GWM: Towards Scalable Gaussian World Models for Robotic Manipulation |
|
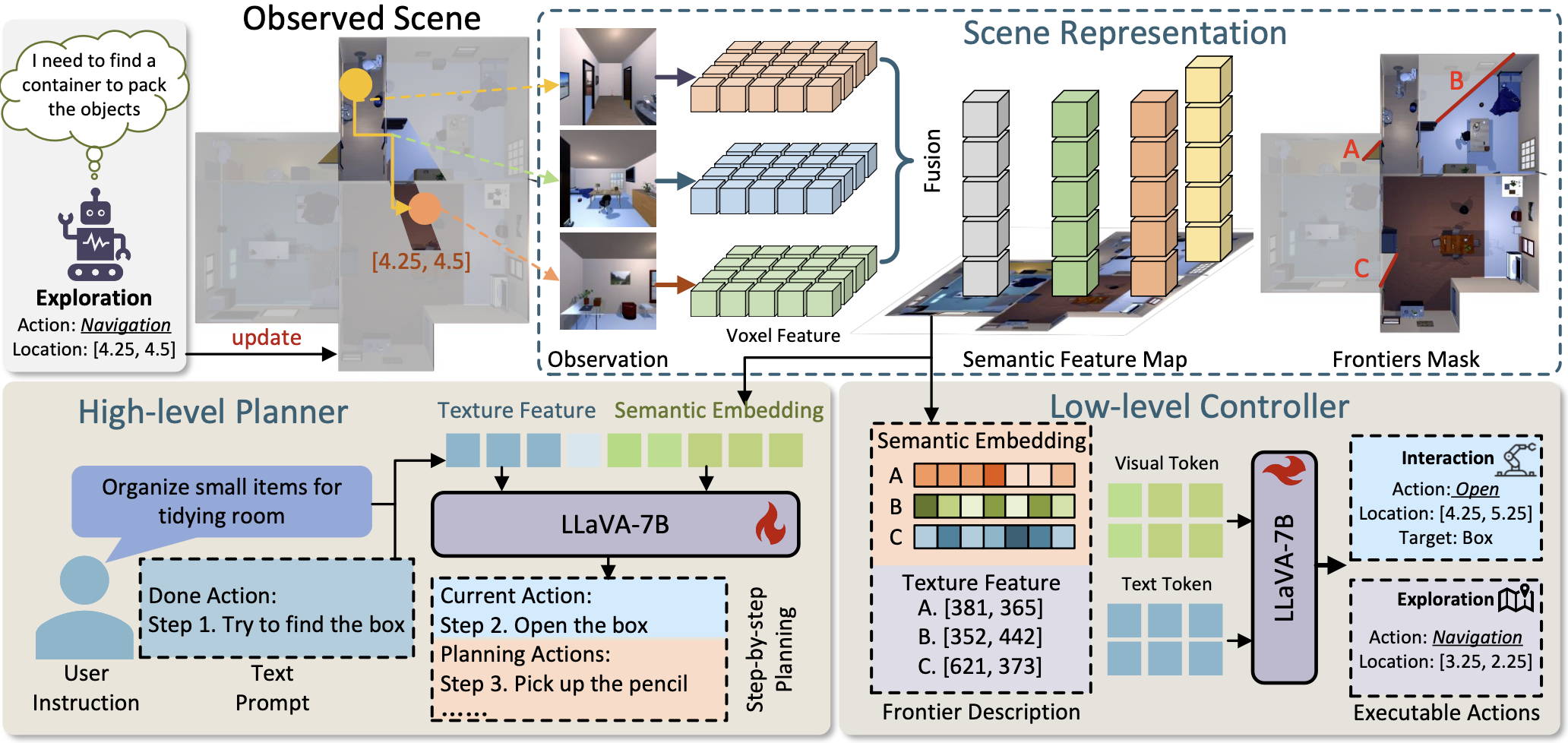
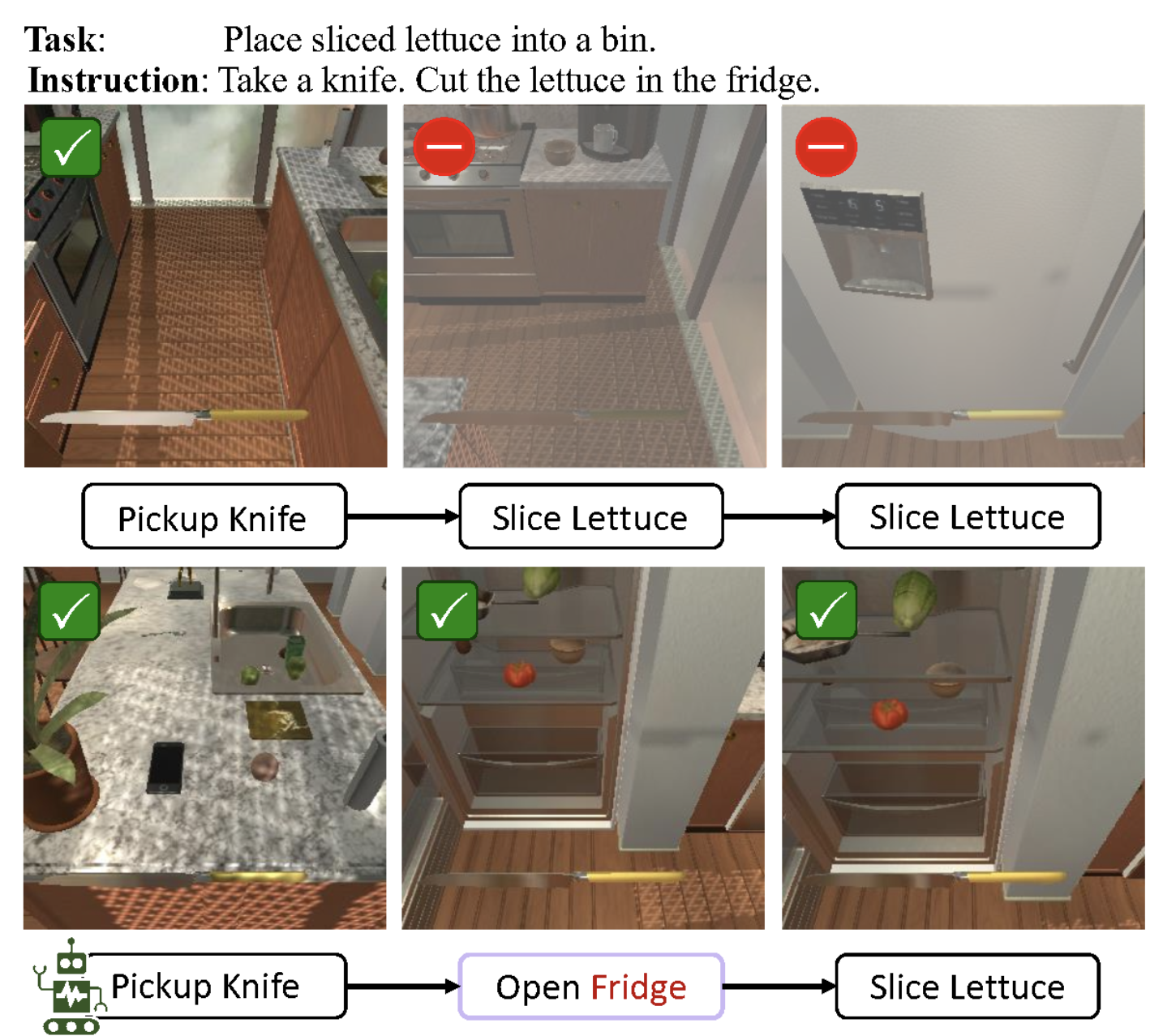
Embodied Instruction Following in Unknown Environments |
|
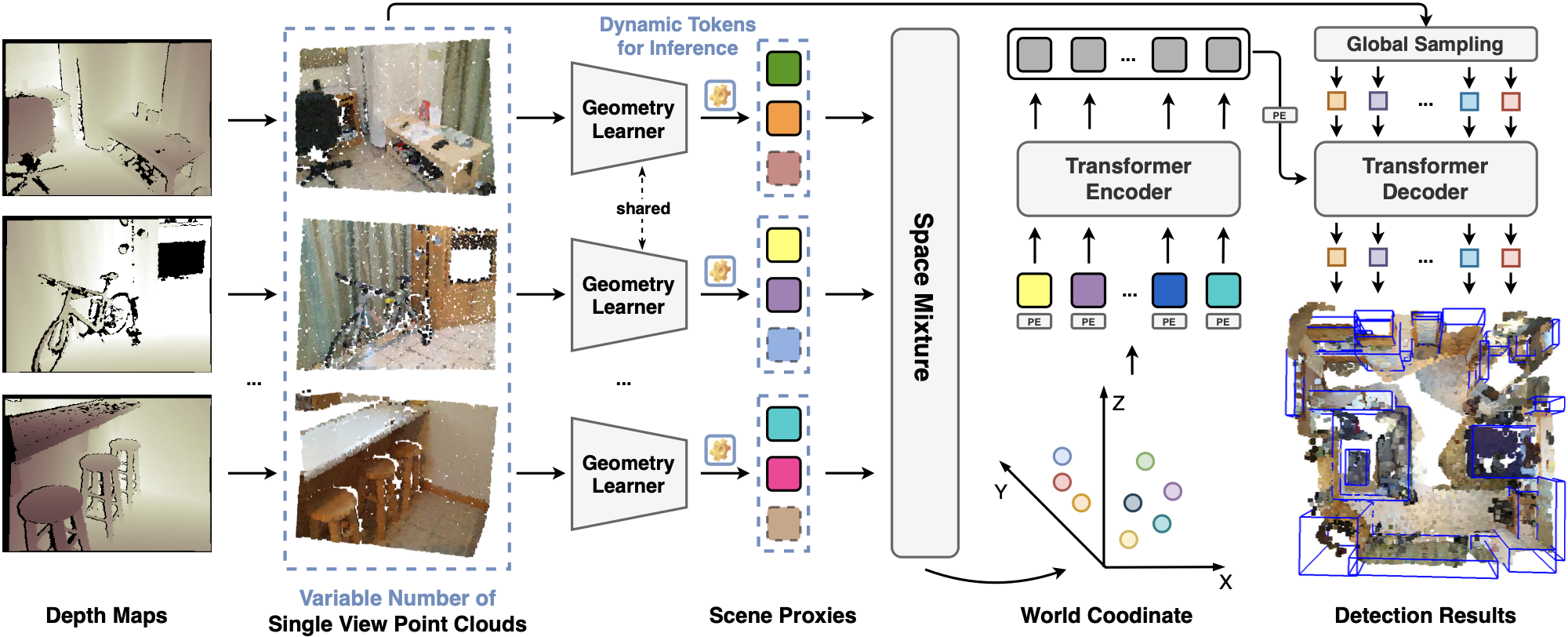
Anyview: General Indoor 3D Object Detection with Variable Frames |
|
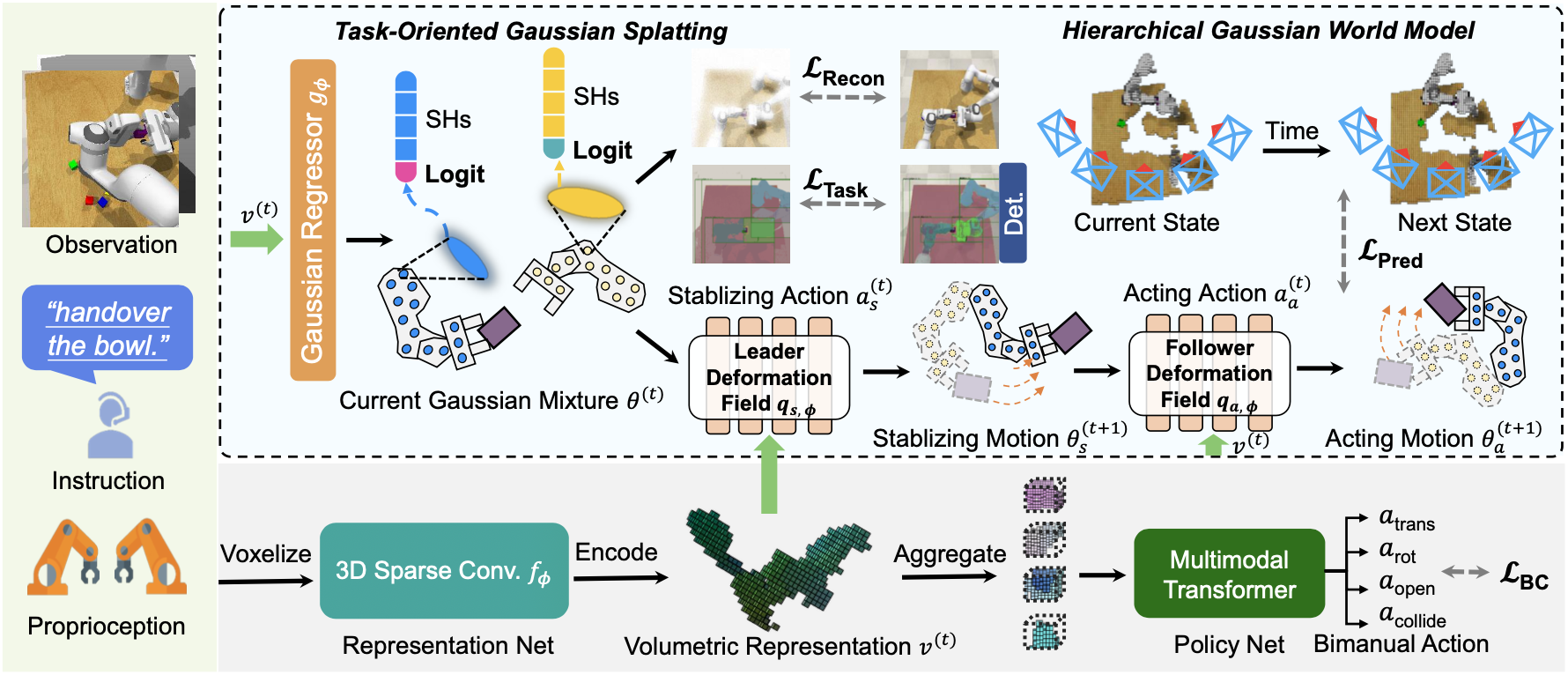
ManiGaussian++: General Robotic Bimanual Manipulation with Hierarchical Gaussian World Model |
|
UniGoal: Towards Universal Zero-shot Goal-oriented Navigation |
|
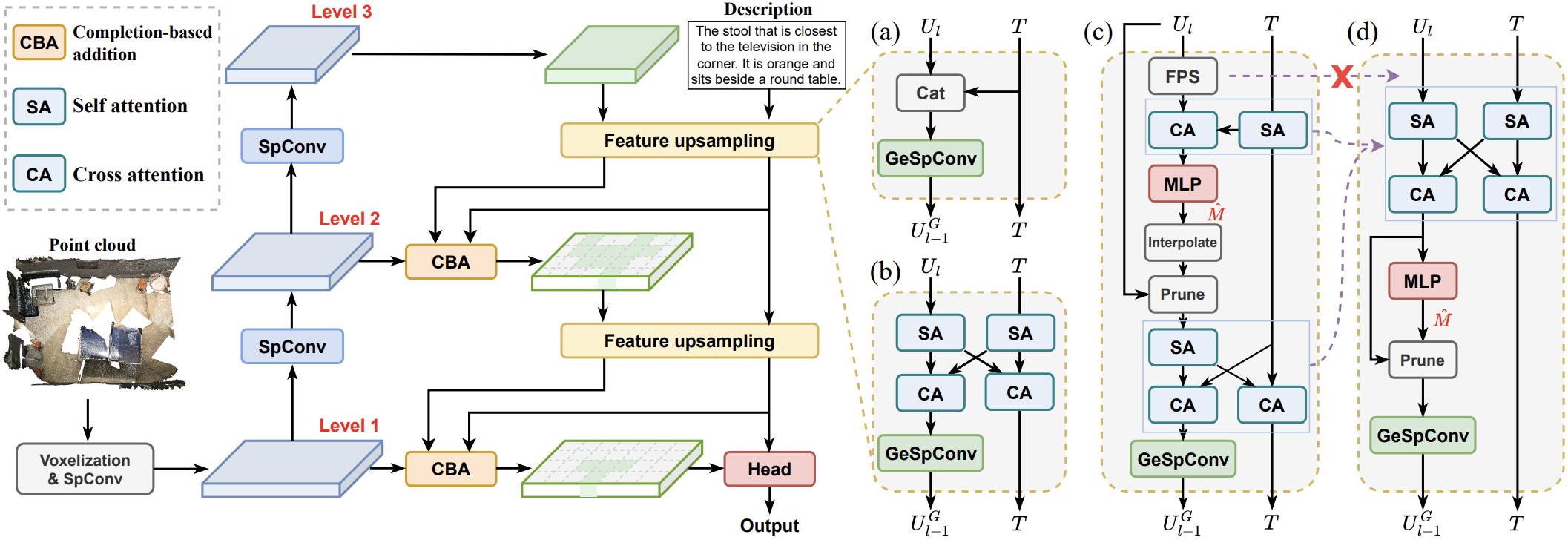
TSP3D: Text-guided Sparse Voxel Pruning for Efficient 3D Visual Grounding |
|
ThinkBot: Embodied Instruction Following with Thought Chain Reasoning |
|
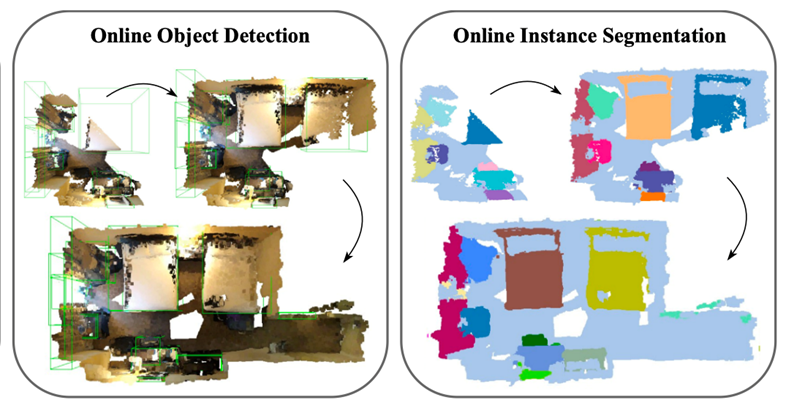
EmbodiedSAM: Online Segment Any 3D Thing in Real Time |
|
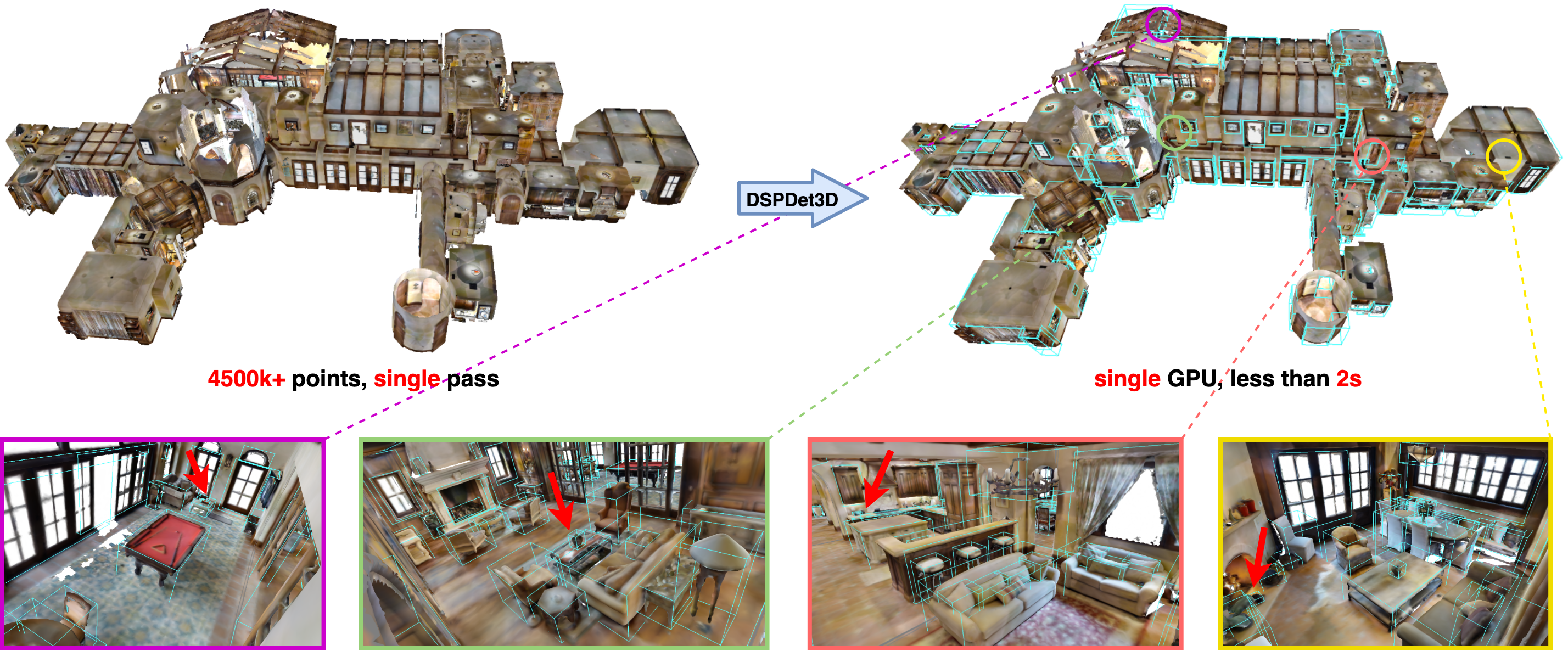
3D Small Object Detection with Dynamic Spatial Pruning |

|
ManiGaussian: Dynamic Gaussian Splatting for Multi-task Robotic Manipulation |
|
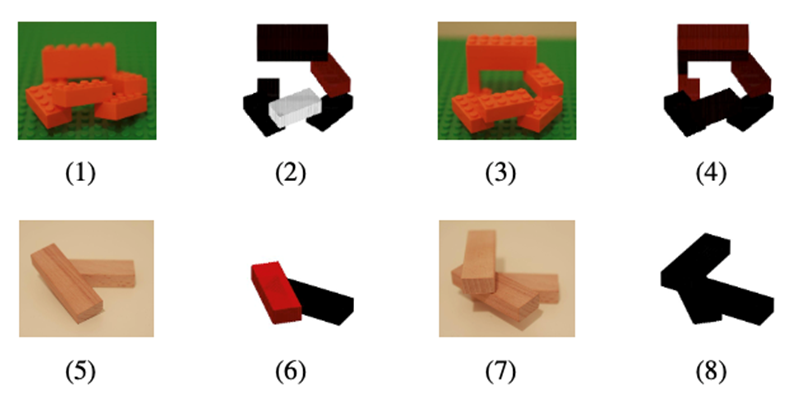
StableLego: Stability Analysis of Block Stacking Assembly |
|
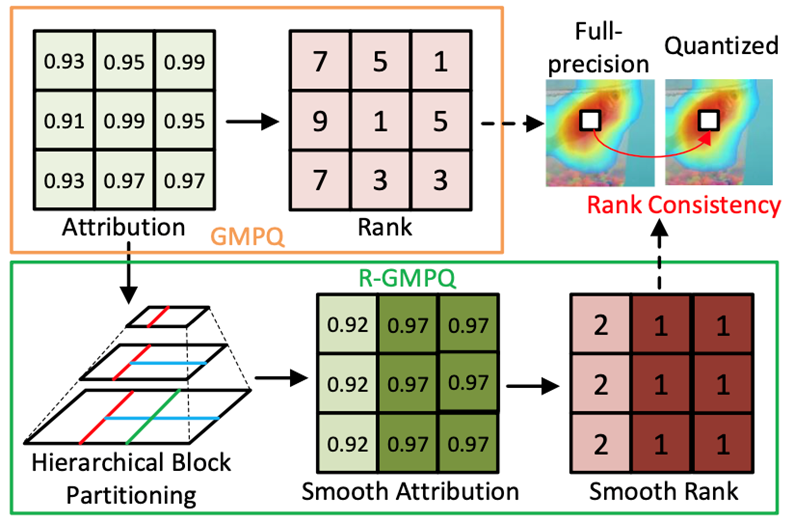
Learning Generalizable Mixed-Precision Quantization via Attribution Imitation |
|
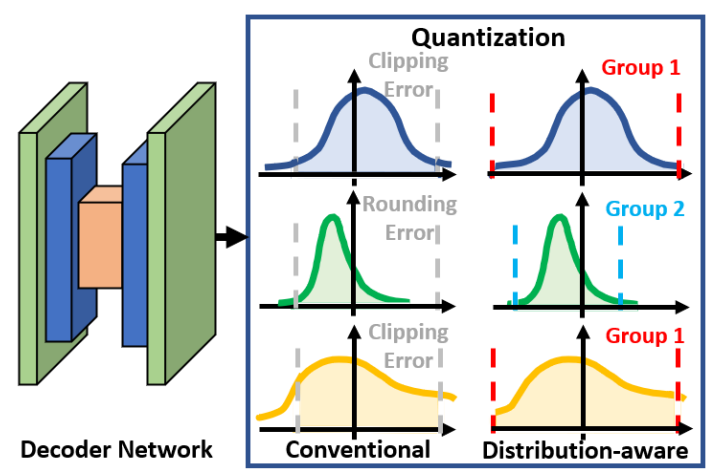
Towards Accurate Data-free Quantization for Diffusion Models |
|
Memory-based Adapters for Online 3D Scene Perception
|
|
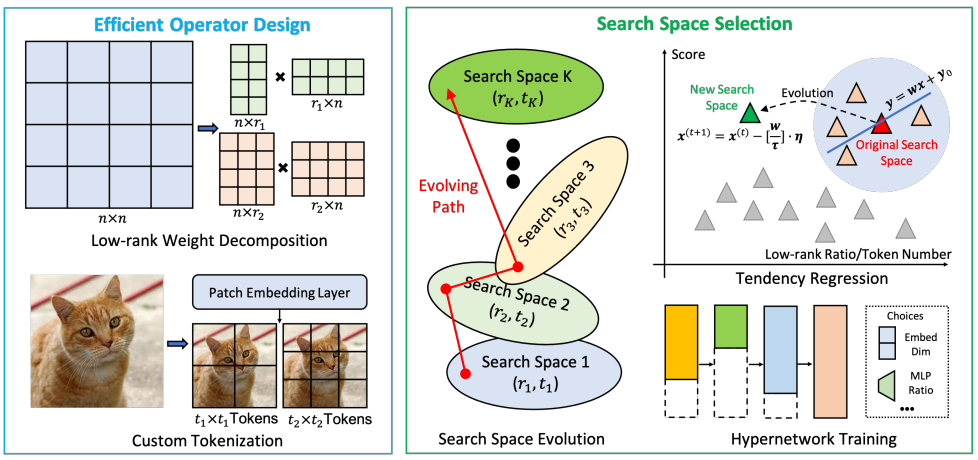
MCUFormer: Deploying Vision Transformers on Microcontrollers with Limited Memory
|
|
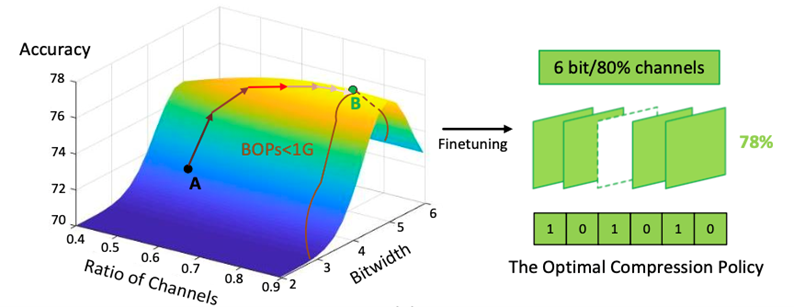
Learning Accurate Performance Predictors for Ultrafast Automated Model Compression
|
|
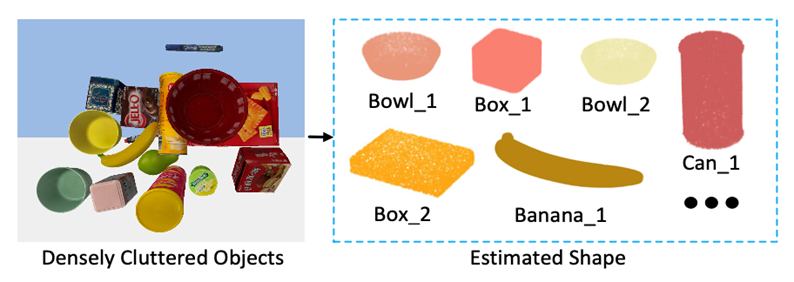
Category-level Shape Estimation for Densely Cluttered Objects
|
|
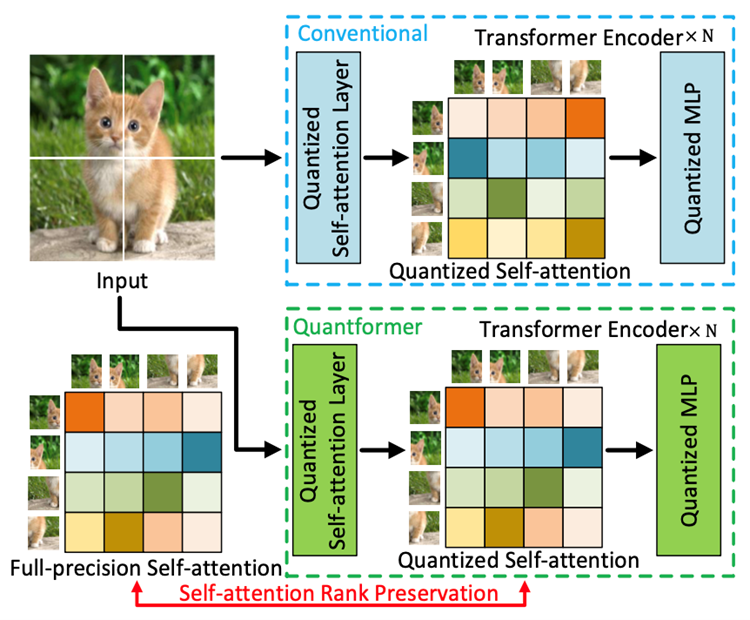
Quantformer: Learning Extremely Low-precision Vision Transformers
|
|
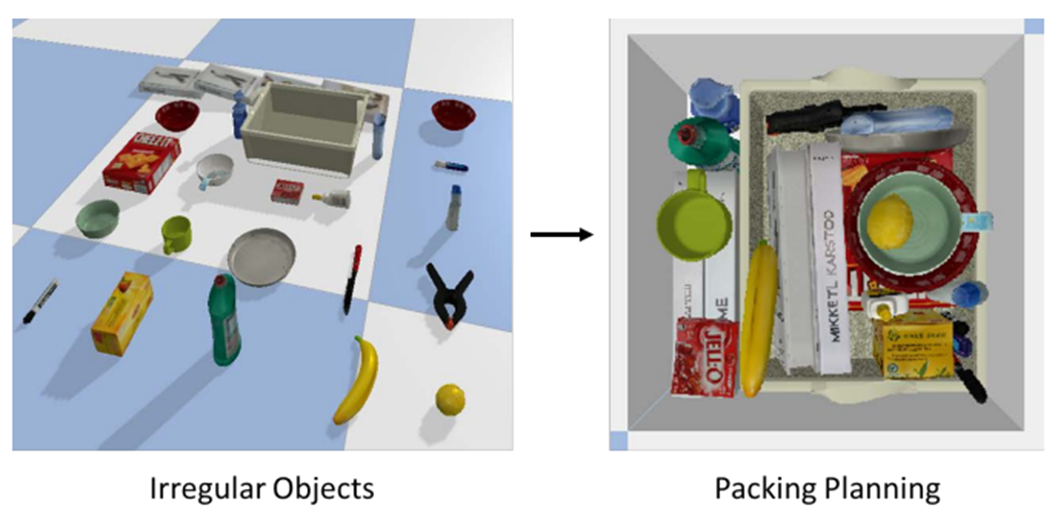
Planning Irregular Object Packing via Hierarchical Reinforcement Learning
|
|
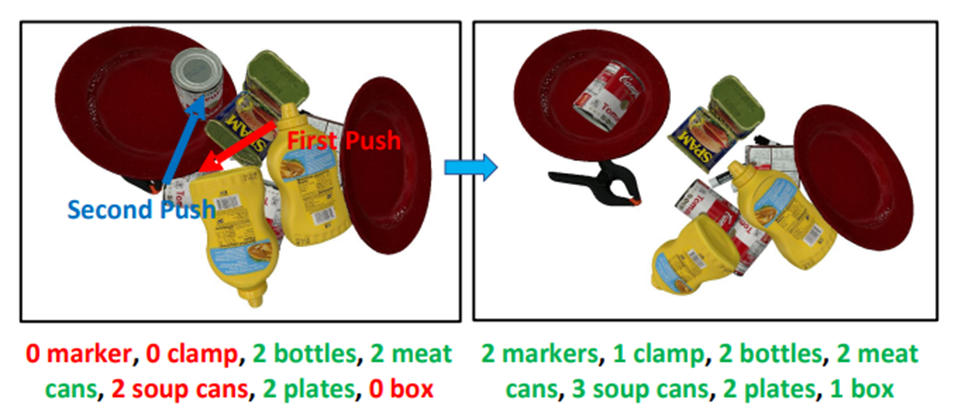
Smart Explorer: Recognizing Objects in Dense Clutter via Interactive Exploration
|
|
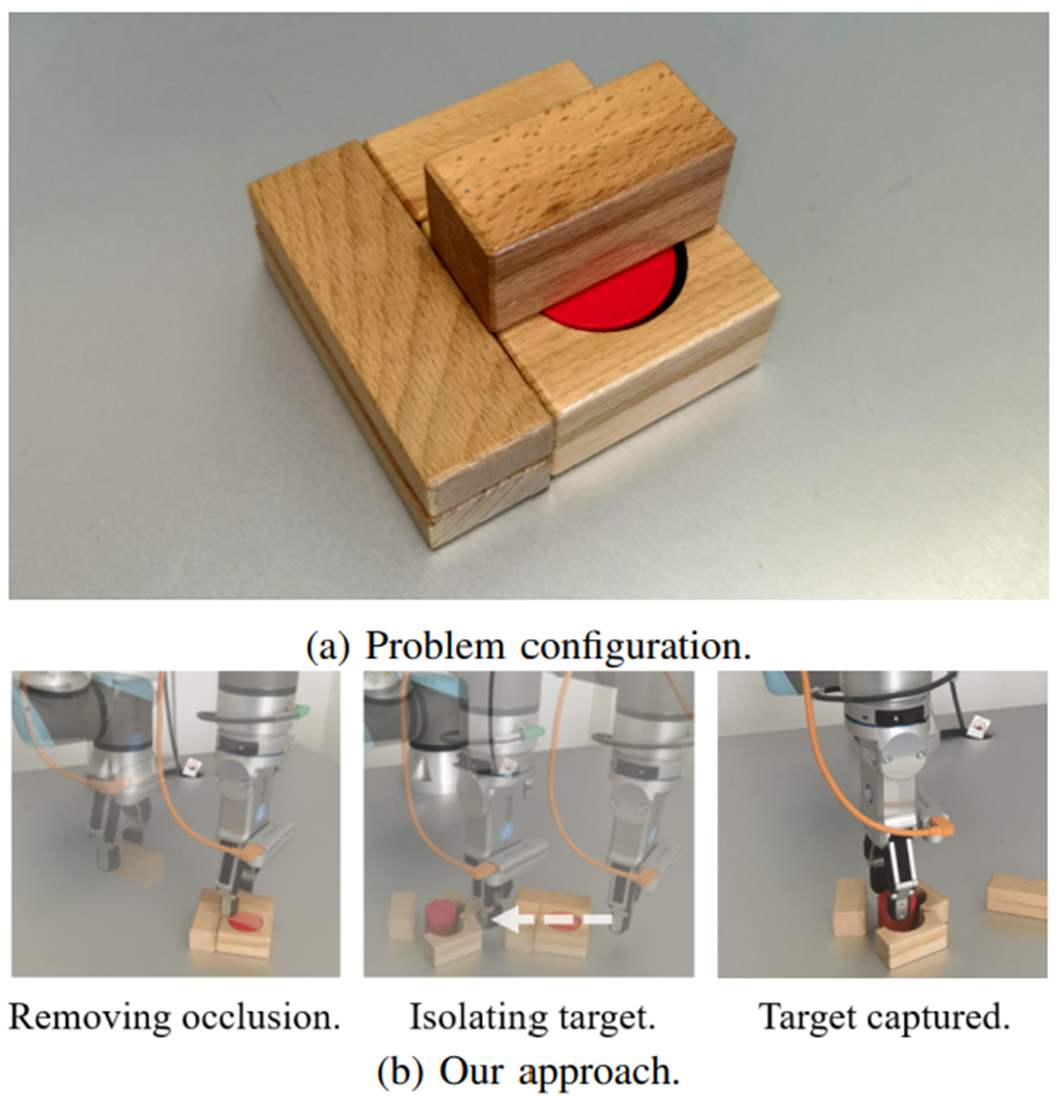
GE-Grasp: Efficeint Target Oriented Grasping in Dense Clutter
|

|
Shapley-NAS: Discovering Operation Contribution for Neural Architecture Search
|

|
Learning Efficient Binarized Object Detectors with Information Compression
|

|
Generalizable Mixed-Precision Quantization via Attribution Rank Preservation
|